Anti-Stall Control Surfaces and Flow Visualization Research
I worked under Professor David Barrett at the Olin College Research Lab for a research project funded by Electric Boat. Our overall goal for this project was to design a control surface that can be used at a higher angle of attack without stalling. We did this by fabricating a testing apparatus of a fish body with modular fins. By spinning the fish body around in a test pool we experimentally measured the lift and drag forces on the fin. Simultaneously we used micro bubble visualization to visualize the flow over the test fin. Microbubble visualization allowed us to visualize the flow and see how the separation bubble forms and reacts at different speeds and angles.
Testing Apparatus
The fish body spins around a central post in the middle of the pool. It is driven around the pool by a thruster attached to a horizontal airfoil. Here is an image of an overview model of the fish in the pool.



My Work
My role was focused on designing the research platform setup for testing of various fin designs. I designed, specced, and fabricated the system. I 3D printed and epoxied the fish body as shown below.

I turned and bored the bearing holder such that two bearings would press-fit into the casing.


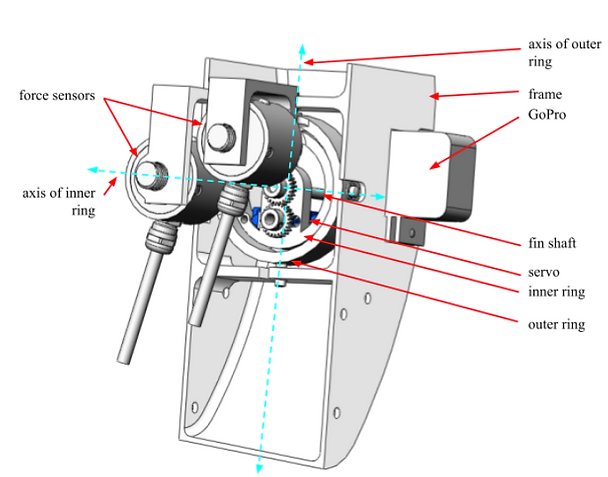
I also made a multidirectional force sensor by using two in-line submersible sensors and two 3D-printed rings free to spin along the z and x axis. There are ball bearings attaching the outer ring to the frame and inner ring to the outer ring. One sensor is attached to the frame and an outer ring. This sensor will determine forces that cause yaw movement. The other sensor is attached to the outer ring and inner ring. This sensor will determine forces that cause roll movement.