Mechanical Design - Robotic Fish Propulsion Mechanism
For the course, Mechanical Design, I worked on a project designing a robotic fish propulsion mechanism. I based my work off of Zhong and Du's paper, "Design and Implementation of a Novel Robot Fish with Active and Compliant Propulsion Mechanism". Fishes move the back of their bodies in a harmonic motion making their movement through water very efficient. The string pulls the back end of the fish forward causing it to curve. Zhong and Du’s design used a motor that would rotate back and forth, but I wanted my design to have the motor continuously spinning in one direction to achieve higher speeds. I did this using a short link that two separate strings were attached to the same end of and a motor attached to the other end.
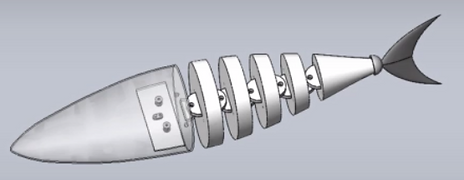
The image below shows my design.


I used MATLAB to calculate the positions of each of the joints of the fish at different motor positions and times.



